 咨詢電話:18128028677
咨詢電話:18128028677
咨詢電話:18128028677 產(chǎn)品列表PRODUCTS LIST
在無人機(jī)技術(shù)飛速發(fā)展的今天,其應(yīng)用場景已從消費(fèi)級航拍延伸至工業(yè)巡檢、物流配送、應(yīng)急救援、農(nóng)業(yè)植保等多個領(lǐng)域。無論是在高空測繪時遭遇突發(fā)陣風(fēng),還是在山區(qū)救援中面對復(fù)雜氣流,無人機(jī)的抗風(fēng)性能都直接決定了作業(yè)安全性、任務(wù)完成度和數(shù)據(jù)可靠性。抗風(fēng)測試作為驗(yàn)證無人機(jī)抗風(fēng)能力的核心環(huán)節(jié),形成了涵蓋多種技術(shù)手段的完整體系,其中抗風(fēng)測試風(fēng)墻技術(shù)以其獨(dú)特的優(yōu)勢,在中大型無人機(jī)和復(fù)雜場景抗風(fēng)測試中占據(jù)著愈發(fā)重要的地位。
由Delta德爾塔儀器聯(lián)合電子科技大學(xué)(深圳)高等研究院——深思實(shí)驗(yàn)室團(tuán)隊(duì)、工信部電子五所賽寶低空通航實(shí)驗(yàn)室研發(fā)制造的無人機(jī)抗風(fēng)試驗(yàn)風(fēng)墻\可移動風(fēng)場模擬裝置\風(fēng)墻裝置,正成為解決無人機(jī)行業(yè)抗風(fēng)性能測試難題的突破性技術(shù)。
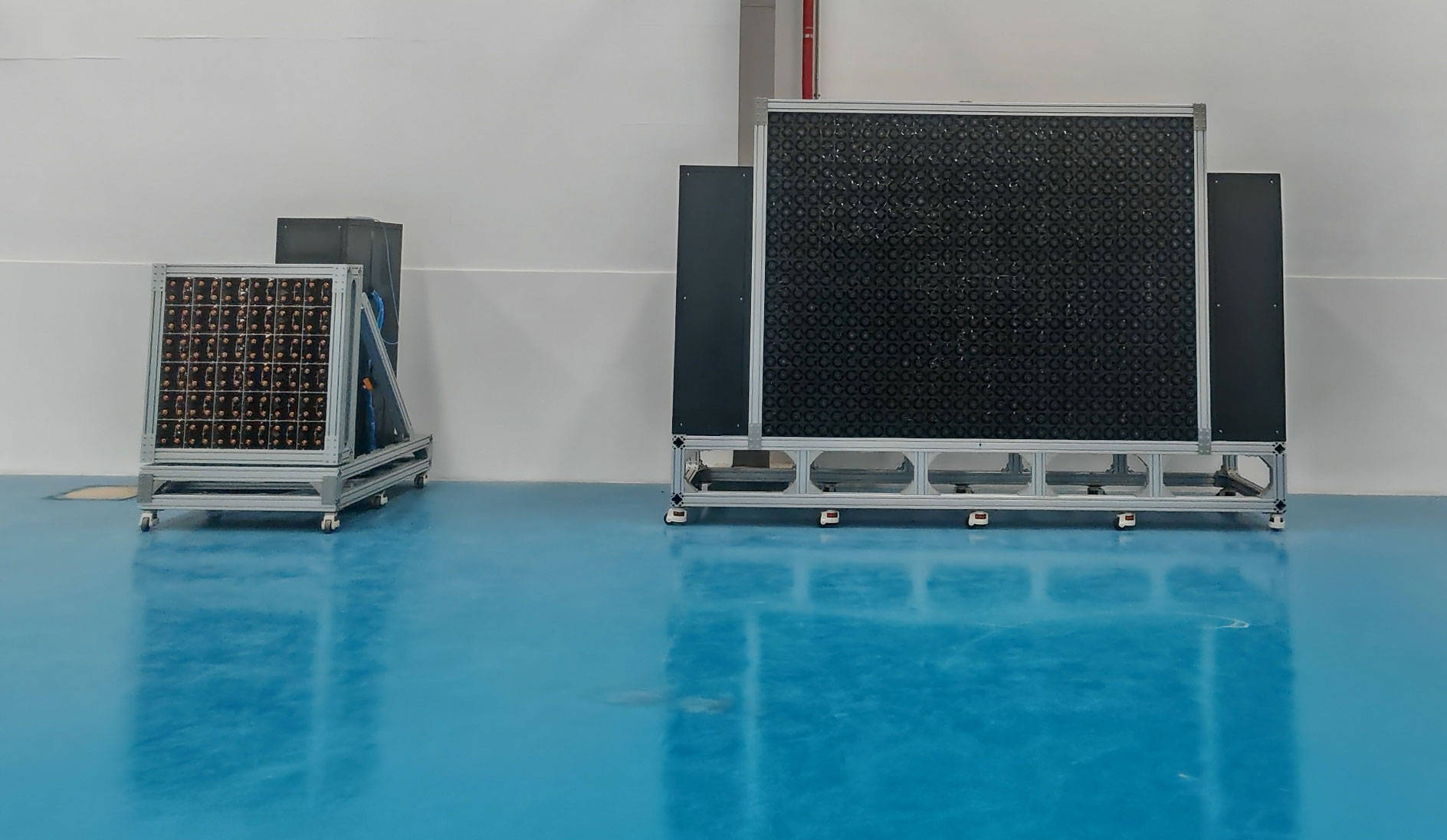

無人機(jī)風(fēng)墻測試系統(tǒng)\無人機(jī)抗風(fēng)試驗(yàn)風(fēng)墻\可移動風(fēng)場模擬裝置\風(fēng)墻裝置
無人機(jī)抗風(fēng)測試的核心技術(shù)體系
無人機(jī)抗風(fēng)測試的核心目標(biāo)是模擬不同風(fēng)速、風(fēng)向及湍流條件,檢測無人機(jī)在ji端氣流環(huán)境下的姿態(tài)穩(wěn)定性、動力系統(tǒng)冗余、操控響應(yīng)精度和結(jié)構(gòu)強(qiáng)度等關(guān)鍵指標(biāo)。目前主流的抗風(fēng)測試技術(shù)主要包括外場實(shí)飛測試、傳統(tǒng)風(fēng)洞測試和抗風(fēng)測試風(fēng)墻測試三大類,各類技術(shù)各具特點(diǎn),適配不同的測試需求。
外場實(shí)飛測試:最直接的實(shí)戰(zhàn)驗(yàn)證
外場實(shí)飛測試是利用自然環(huán)境中的風(fēng)力條件,在空曠場地、山區(qū)或海岸等典型場景下開展的實(shí)地測試。測試人員通過氣象設(shè)備實(shí)時監(jiān)測風(fēng)速、風(fēng)向和湍流強(qiáng)度,操控?zé)o人機(jī)完成懸停、巡航、爬升、下降等一系列標(biāo)準(zhǔn)動作,同時借助無人機(jī)自帶的飛控系統(tǒng)和外接傳感器記錄姿態(tài)角、角速度、動力輸出功率、電池能耗等數(shù)據(jù)。
該技術(shù)的優(yōu)勢在于測試環(huán)境wan全貼合實(shí)際應(yīng)用場景,能最真實(shí)地反映無人機(jī)的抗風(fēng)表現(xiàn),且測試成本較低,無需復(fù)雜的專用設(shè)備。但局限性也十分明顯:受氣象條件制約嚴(yán)重,無法主動調(diào)控風(fēng)速和湍流參數(shù),測試重復(fù)性差;ji端風(fēng)力條件下存在無人機(jī)墜機(jī)損壞的風(fēng)險(xiǎn);測試數(shù)據(jù)的采集精度易受環(huán)境干擾,難以對細(xì)微的性能差異進(jìn)行量化分析。因此,外場實(shí)飛測試通常用于初步驗(yàn)證或最終的實(shí)戰(zhàn)考核,難以作為核心研發(fā)階段的精細(xì)化測試手段。
傳統(tǒng)風(fēng)洞測試:高精度的實(shí)驗(yàn)室模擬
傳統(tǒng)風(fēng)洞是航空航天領(lǐng)域成熟的氣動性能測試設(shè)備,其原理是通過大功率風(fēng)機(jī)產(chǎn)生可控的氣流,在封閉的管道內(nèi)形成穩(wěn)定的風(fēng)場,將無人機(jī)模型或?qū)嶓w固定在測試平臺上,模擬飛行過程中的氣動環(huán)境。風(fēng)洞測試可通過調(diào)節(jié)風(fēng)機(jī)功率、氣流導(dǎo)流裝置等精確控制風(fēng)速(從微風(fēng)到強(qiáng)風(fēng))、風(fēng)向和湍流等級,配合壓力傳感器、氣動天平、高速攝像系統(tǒng)等設(shè)備,實(shí)現(xiàn)對無人機(jī)氣動載荷、升阻力特性、姿態(tài)穩(wěn)定性等參數(shù)的高精度測量。
相較于外場實(shí)飛,傳統(tǒng)風(fēng)洞測試具有可控性強(qiáng)、重復(fù)性高、數(shù)據(jù)精度高的優(yōu)勢,能為無人機(jī)氣動外形優(yōu)化、動力系統(tǒng)匹配等研發(fā)環(huán)節(jié)提供精準(zhǔn)的數(shù)據(jù)支撐。但傳統(tǒng)風(fēng)洞也存在顯著短板:一是建設(shè)和運(yùn)行成本ji高,大型風(fēng)洞的建設(shè)費(fèi)用動輒數(shù)億元,且能耗巨大;二是測試空間受限,多數(shù)傳統(tǒng)風(fēng)洞的測試段截面尺寸較小,難以適配中大型無人機(jī)或多旋翼無人機(jī)的完整尺寸測試,通常需要采用縮尺模型,導(dǎo)致測試結(jié)果與實(shí)體飛行存在一定誤差;三是氣流邊界效應(yīng)明顯,封閉管道內(nèi)的氣流與自然環(huán)境中的開闊氣流存在差異,對測試結(jié)果的準(zhǔn)確性有一定影響。
抗風(fēng)測試風(fēng)墻:新型的開闊場模擬技術(shù)
為解決傳統(tǒng)風(fēng)洞測試空間受限、成本高昂以及外場實(shí)飛測試可控性差的問題,抗風(fēng)測試風(fēng)墻技術(shù)應(yīng)運(yùn)而生。抗風(fēng)測試風(fēng)墻又稱“開放式風(fēng)洞"或“陣列式風(fēng)墻",是通過由數(shù)十甚至數(shù)百個高性能風(fēng)機(jī)組成的陣列系統(tǒng),在開闊空間內(nèi)構(gòu)建出大面積、高均勻性、可精準(zhǔn)調(diào)控的人工風(fēng)場,實(shí)現(xiàn)對無人機(jī)抗風(fēng)性能的高效測試。該技術(shù)兼顧了傳統(tǒng)風(fēng)洞的可控性和外場實(shí)飛的開闊性,成為近年來無人機(jī)抗風(fēng)測試領(lǐng)域的重要創(chuàng)新方向。
抗風(fēng)測試風(fēng)墻的技術(shù)解析與應(yīng)用優(yōu)勢
核心技術(shù)構(gòu)成:從風(fēng)場生成到數(shù)據(jù)采集的全鏈條可控
抗風(fēng)測試風(fēng)墻的核心技術(shù)體系涵蓋風(fēng)場生成系統(tǒng)、流場控制系統(tǒng)、測試固定系統(tǒng)和數(shù)據(jù)采集分析系統(tǒng)四大模塊,各模塊協(xié)同工作實(shí)現(xiàn)對風(fēng)場參數(shù)的精準(zhǔn)調(diào)控和測試數(shù)據(jù)的高效采集。
風(fēng)場生成系統(tǒng):這是風(fēng)墻的核心動力來源,由高密度風(fēng)機(jī)陣列組成。風(fēng)機(jī)陣列通常采用矩陣式布局,單個風(fēng)機(jī)采用可變轉(zhuǎn)速的直流無刷電機(jī)驅(qū)動,通過獨(dú)立的控制器實(shí)現(xiàn)轉(zhuǎn)速調(diào)節(jié)。通過對不同區(qū)域風(fēng)機(jī)轉(zhuǎn)速的差異化控制,風(fēng)墻可生成均勻流、梯度流、湍流等多種風(fēng)場類型,風(fēng)速調(diào)節(jié)范圍通常覆蓋1-25m/s(對應(yīng)1-10級風(fēng)),滿足從微型消費(fèi)級無人機(jī)到中大型工業(yè)級無人機(jī)的測試需求。部分高duan風(fēng)墻系統(tǒng)還可通過風(fēng)機(jī)陣列的動態(tài)啟停和轉(zhuǎn)速調(diào)節(jié),模擬突發(fā)陣風(fēng)、風(fēng)向突變等ji端氣流場景,更貼近實(shí)際應(yīng)用中的復(fù)雜風(fēng)力環(huán)境。
流場控制系統(tǒng):為保證風(fēng)場的均勻性和穩(wěn)定性,流場控制系統(tǒng)通過氣流導(dǎo)流板、整流網(wǎng)和湍流發(fā)生器等裝置對風(fēng)機(jī)陣列產(chǎn)生的氣流進(jìn)行優(yōu)化。導(dǎo)流板用于調(diào)整氣流的出風(fēng)方向,實(shí)現(xiàn)風(fēng)向在0-360°范圍內(nèi)的連續(xù)調(diào)節(jié);整流網(wǎng)可過濾氣流中的渦流,降低風(fēng)場湍流強(qiáng)度,使測試區(qū)域內(nèi)的風(fēng)速分布誤差控制在±5%以內(nèi);湍流發(fā)生器則通過特定結(jié)構(gòu)的格柵或擾動裝置,模擬自然環(huán)境中的湍流場景,可精準(zhǔn)調(diào)節(jié)湍流強(qiáng)度在5%-30%之間,滿足不同場景下的抗風(fēng)測試需求。
測試固定系統(tǒng):與傳統(tǒng)風(fēng)洞的剛性固定不同,抗風(fēng)測試風(fēng)墻的固定系統(tǒng)通常采用柔性牽引或半固定平臺設(shè)計(jì)。對于微型無人機(jī),采用輕質(zhì)牽引繩配合三維力傳感器固定,既限制無人機(jī)的大幅位移避免碰撞損壞,又能讓無人機(jī)在風(fēng)場中保持一定的運(yùn)動自由度,更真實(shí)地反映其姿態(tài)調(diào)整過程;對于中大型無人機(jī),則采用可調(diào)節(jié)角度的半固定平臺,平臺內(nèi)置力矩傳感器和位移傳感器,可實(shí)時監(jiān)測無人機(jī)在風(fēng)場中的受力情況和姿態(tài)變化。這種設(shè)計(jì)既保證了測試過程的安全性,又最大限度地還原了無人機(jī)在自然風(fēng)場中的飛行狀態(tài)。
數(shù)據(jù)采集分析系統(tǒng):該系統(tǒng)整合了多源傳感器數(shù)據(jù),實(shí)現(xiàn)對測試過程的全面監(jiān)測。通過分布在測試區(qū)域內(nèi)的多點(diǎn)風(fēng)速儀實(shí)時采集風(fēng)場參數(shù),確保風(fēng)場符合測試要求;通過無人機(jī)自帶的飛控系統(tǒng)采集姿態(tài)角、角速度、電機(jī)轉(zhuǎn)速、電池電壓等數(shù)據(jù);通過高速攝像系統(tǒng)記錄無人機(jī)的視覺姿態(tài)變化,配合圖像識別技術(shù)分析其晃動幅度和穩(wěn)定性;所有數(shù)據(jù)通過專用數(shù)據(jù)總線傳輸至中央控制系統(tǒng),由專業(yè)軟件進(jìn)行實(shí)時處理和離線分析,生成抗風(fēng)性能評估報(bào)告,為無人機(jī)的設(shè)計(jì)優(yōu)化提供數(shù)據(jù)支撐。
應(yīng)用優(yōu)勢:適配無人機(jī)測試的價(jià)值
與傳統(tǒng)測試技術(shù)相比,抗風(fēng)測試風(fēng)墻在無人機(jī)抗風(fēng)測試中展現(xiàn)出顯著的應(yīng)用優(yōu)勢,主要體現(xiàn)在以下幾個方面:
一是測試空間靈活開闊:風(fēng)墻系統(tǒng)無需封閉管道,可在開闊場地搭建,測試區(qū)域面積可根據(jù)需求調(diào)整,從數(shù)十平方米到數(shù)百平方米不等,能夠適配從微型無人機(jī)到翼展數(shù)米的中大型無人機(jī)的全尺寸測試,避免了縮尺模型測試帶來的誤差,大幅提升了測試結(jié)果的真實(shí)性。
二是風(fēng)場參數(shù)精準(zhǔn)可控:風(fēng)墻系統(tǒng)可實(shí)現(xiàn)風(fēng)速、風(fēng)向、湍流強(qiáng)度的獨(dú)立調(diào)節(jié)和精準(zhǔn)控制,風(fēng)速調(diào)節(jié)精度可達(dá)0.1m/s,風(fēng)向調(diào)節(jié)精度可達(dá)1°,湍流強(qiáng)度調(diào)節(jié)范圍覆蓋自然環(huán)境中的大部分場景,能夠模擬從平穩(wěn)微風(fēng)到強(qiáng)臺風(fēng)、從固定風(fēng)向到突發(fā)陣風(fēng)等多種復(fù)雜風(fēng)力環(huán)境,滿足無人機(jī)研發(fā)過程中不同階段的測試需求,為技術(shù)優(yōu)化提供精準(zhǔn)的數(shù)據(jù)支撐。
三是測試成本與安全性平衡:相較于傳統(tǒng)大型風(fēng)洞,風(fēng)墻系統(tǒng)的建設(shè)和運(yùn)行成本顯著降低,且可根據(jù)測試需求靈活增減風(fēng)機(jī)數(shù)量,實(shí)現(xiàn)模塊化擴(kuò)展;同時,柔性固定系統(tǒng)和開闊的測試環(huán)境降低了無人機(jī)在ji端風(fēng)場測試中的損壞風(fēng)險(xiǎn),測試過程中可實(shí)時中斷和調(diào)整參數(shù),提升了測試的安全性和效率。
四是貼近實(shí)際應(yīng)用場景:風(fēng)墻系統(tǒng)在開闊空間內(nèi)構(gòu)建風(fēng)場,避免了傳統(tǒng)風(fēng)洞封閉管道帶來的氣流邊界效應(yīng),風(fēng)場特性更貼近自然環(huán)境中的風(fēng)力條件,測試結(jié)果與無人機(jī)實(shí)際作業(yè)表現(xiàn)的一致性更高,可直接為無人機(jī)的場景化應(yīng)用提供抗風(fēng)性能驗(yàn)證,如物流無人機(jī)的山區(qū)抗風(fēng)測試、巡檢無人機(jī)的海上抗風(fēng)驗(yàn)證等。
抗風(fēng)測試風(fēng)墻的應(yīng)用場景與發(fā)展趨勢
目前,抗風(fēng)測試風(fēng)墻已廣泛應(yīng)用于無人機(jī)研發(fā)、生產(chǎn)檢測和認(rèn)證考核等多個環(huán)節(jié)。在研發(fā)階段,風(fēng)墻系統(tǒng)為無人機(jī)氣動外形優(yōu)化、飛控算法調(diào)試、動力系統(tǒng)匹配提供精細(xì)化測試數(shù)據(jù),例如通過模擬不同風(fēng)場下的無人機(jī)姿態(tài)變化,優(yōu)化飛控系統(tǒng)的抗風(fēng)補(bǔ)償算法;在生產(chǎn)檢測階段,風(fēng)墻系統(tǒng)可作為批量生產(chǎn)無人機(jī)的抗風(fēng)性能抽檢設(shè)備,快速驗(yàn)證產(chǎn)品的一致性和可靠性;在認(rèn)證考核階段,風(fēng)墻系統(tǒng)已成為部分行業(yè)標(biāo)準(zhǔn)抗風(fēng)測試的指定設(shè)備,如無人機(jī)駕駛員執(zhí)照考核中的抗風(fēng)能力測試、工業(yè)級無人機(jī)的行業(yè)認(rèn)證測試等。
未來,隨著無人機(jī)技術(shù)的不斷發(fā)展,抗風(fēng)測試風(fēng)墻將向更高精度、更復(fù)雜場景模擬和智能化方向演進(jìn)。一方面,風(fēng)場調(diào)控精度將進(jìn)一步提升,風(fēng)速調(diào)節(jié)范圍可擴(kuò)展至30m/s以上(對應(yīng)11級強(qiáng)風(fēng)),同時實(shí)現(xiàn)對亂流、下?lián)舯┝鞯萰i端氣流場景的精準(zhǔn)模擬;另一方面,智能化水平將顯著提高,通過引入AI算法實(shí)現(xiàn)風(fēng)場參數(shù)的自適應(yīng)調(diào)節(jié),根據(jù)無人機(jī)的實(shí)時姿態(tài)數(shù)據(jù)動態(tài)調(diào)整風(fēng)場強(qiáng)度,模擬更真實(shí)的動態(tài)氣流環(huán)境;此外,風(fēng)墻系統(tǒng)還將與虛擬現(xiàn)實(shí)、數(shù)字孿生技術(shù)深度融合,構(gòu)建虛擬測試場景,實(shí)現(xiàn)虛擬與實(shí)體結(jié)合的抗風(fēng)測試,進(jìn)一步降低測試成本、提升測試效率。
結(jié)語
無人機(jī)抗風(fēng)性能是決定其應(yīng)用邊界的核心指標(biāo),而抗風(fēng)測試技術(shù)的發(fā)展為無人機(jī)性能提升提供了關(guān)鍵支撐。從外場實(shí)飛的實(shí)戰(zhàn)驗(yàn)證到傳統(tǒng)風(fēng)洞的高精度模擬,再到抗風(fēng)測試風(fēng)墻的創(chuàng)新突破,測試技術(shù)的演進(jìn)始終圍繞著“真實(shí)、精準(zhǔn)、高效"的核心需求。抗風(fēng)測試風(fēng)墻以其靈活開闊的測試空間、精準(zhǔn)可控的風(fēng)場參數(shù)、平衡的成本與安全性,成為適配無人機(jī)全場景抗風(fēng)測試的理想技術(shù)手段。隨著技術(shù)的不斷迭代,抗風(fēng)測試風(fēng)墻將進(jìn)一步推動無人機(jī)抗風(fēng)性能的提升,為無人機(jī)在更復(fù)雜、更惡劣的環(huán)境中安全作業(yè)提供堅(jiān)實(shí)保障,助力無人機(jī)產(chǎn)業(yè)向更高質(zhì)量、更廣泛應(yīng)用的方向發(fā)展。
